La cartographie sous-marine : connaître le fond à fond
Pendant très longtemps la surface des océans a été un mur infranchissable, préservant les secrets des fonds marins du regard de l’être humain. Depuis les premières mesures de profondeur avec une simple corde à nœuds, les techniques de cartographie récentes permettent désormais de connaître la nature des fonds marins avec précision. Après avoir dévoilé les richesses géologiques du relief sous-marin, les sondeurs acoustiques sont désormais capables de cartographier les habitats marins. Les dernières avancées permettent même d’obtenir une vision photographique du fond grâce à la photogrammétrie, ou encore de cartographier les fonds littoraux depuis l’espace. Venez découvrir le dessous des cartes marines et l’importance de ces dernières dans les domaines de l’exploration, de l’exploitation et de la protection des fonds marins.
Au départ une simple corde suffit
La cartographie des fonds marins est un vaste domaine incorporant de nombreuses thématiques comme la bathymétrie (mesure de la profondeur), la géologie, l’écologie et l’archéologie. Aujourd’hui, à chaque thématique correspond un équipement et/ou une technique de traitement des données spécifique. Cependant, à l’origine, les préoccupations et l’outillage étaient beaucoup moins complexes.
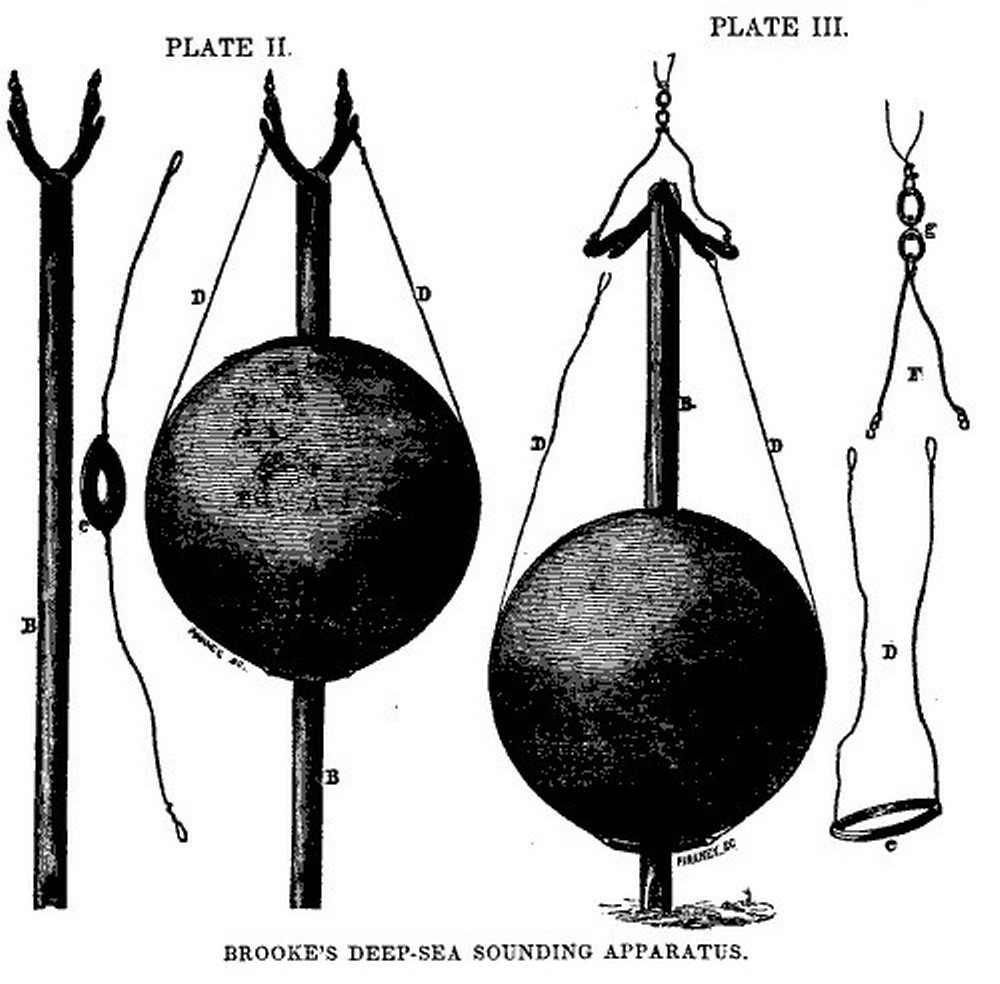
Depuis les premières utilisations d’embarcations par l’être humain au néolithique, la connaissance de la profondeur des espaces navigués est un élément primordial permettant la bonne circulation des biens et des personnes. Avec le commerce maritime qui s’intensifie dès l’Antiquité, et se poursuit au Moyen-Age, pouvoir mesurer la profondeur des eaux côtières avec des moyens du bords est indispensable aux marins afin d’éviter l’échouage et le naufrage. La technique d’alors consiste à utiliser un poids (le plus souvent en plomb) placé à l’extrémité d’une corde avec des graduations de distance (par exemple la coudée ou la brasse) matérialisées par des nœuds. Le poids peut être pourvu d’une cavité ou enduit de graisse animale (du suif) pour recueillir un échantillon du fond marin et en connaître sa nature (sédiment, roche, herbiers, algues). La technique de mesure est simple : laisser couler le plomb jusqu’au fond en comptant les graduations qui défilent. Lorsque le fond est atteint, l’opérateur sent une secousse et enregistre la mesure. Ensuite, soit le plomb est largué au fond, soit il est remonté à bord.
Dès le XIIe siècle, ces informations sont compilées en instructions nautiques pour permettre l’approche de la côte par les navires, en localisant notamment les écueils rocheux et les bancs de sable. La méthode du sondeur à plomb a cependant ses limites et n’est pas appropriée pour les grandes profondeurs au dessus de quelques centaines de mètres. Pendant plusieurs siècles, la profondeur de l’océan est considérée comme littéralement insondable, certains avançant qu’il n’a pas de fond (d’où le terme abysse). Cette conclusion allait d’ailleurs dans le sens de certaines convictions religieuses et de la conception de la morphologie du monde. Les premières grandes navigations océaniques au XVe et XVIe siècle remettent en question la forme de la Terre (qui devient un globe et non plus une galette), et par la même occasion la morphologie des fonds marins. Cependant, si l’océan ne semble plus avoir une profondeur infinie, il reste impossible de faire des sondages sur les fonds abyssaux pour en connaître la profondeur maximale.
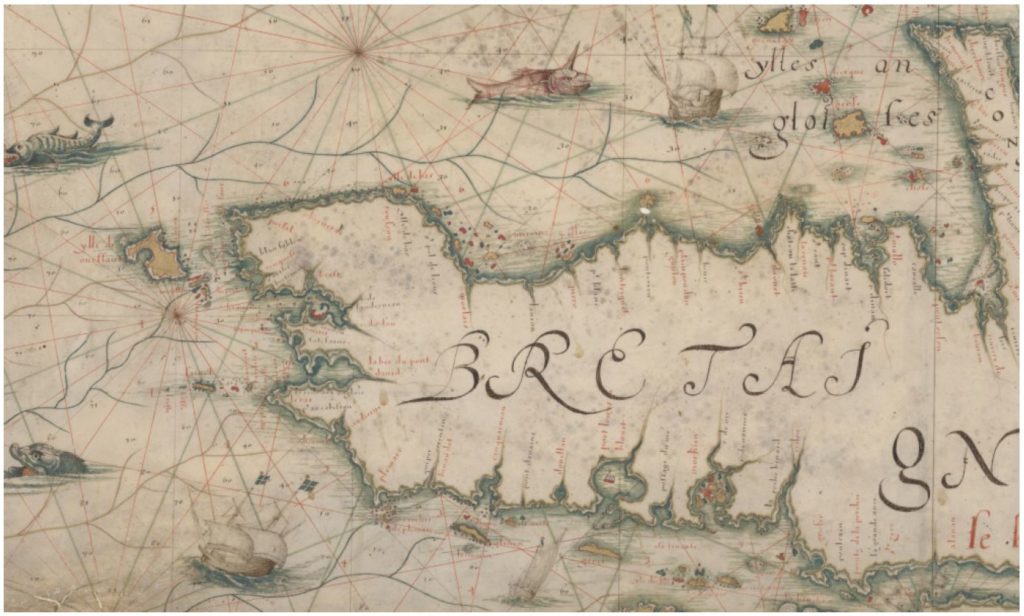
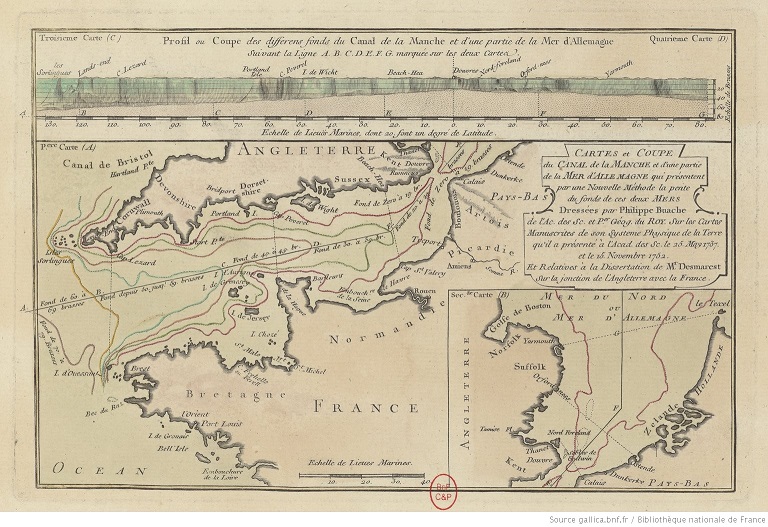
Malgré la limitation des capacités de mesure, l’hydrographie, ou la discipline scientifique s’intéressant à la topographie des étendues d’eau, se développe tout de même au cours du XVIIe et du XVIIe siècle avec l’apparition des premières cartes de profondeur en se restreignant aux zones côtières. En 1627, le cartographe français Jean Guérard produit une carte bathymétrique de la pointe bretonne. C’est également durant cette période (1752), que les premières cartes figurant des courbes de niveau reliant les points de sonde de valeur égale (isobathes) sont employées pour représenter la topographie du fond, avec la carte de la Manche du cartographe français Philippe Buache.
Ce n’est qu’au XIXe siècle que l’exploration du fond des océans s’accélère fortement avec la réalisation de plusieurs campagnes océanographiques majeures sur tous les océans de la planète. Ces campagnes s’intéressent non seulement aux espèces marines et au paramètre physico-chimiques des océans, mais également aux fond marins, à leur nature et à leur profondeur. L’une des plus connues est celle du navire britannique l’HMS Challenger (1872-1876) qui réalisa notamment des mesures bathymétriques à grande profondeur dans le Pacifique et découvrit le point le plus profonde de la planète : la fosse des Mariannes. Son exploration est une autre histoire… Si les motivations à mesurer la profondeur des océans provenait en partie de la soif de connaissances scientifiques, de nombreuses campagnes hydrographiques ont été menées à cette époque dans des buts plus pragmatiques et dirigés par des intérêts économiques comme la pose de câble de télécommunication dès 1850.

Malgré cet important effort d’acquisition de données océanographiques sur une grande partie des océans de la planète, les connaissances des fonds marins restent parcellaires. Dans le domaine de la cartographie des fonds, cela est principalement dû à la technique de mesure de la profondeur qui finalement n’a que très peu évoluée depuis l’Antiquité. C’est une révolution technologique qui va venir bouleverser l’exploration et la cartographie des fonds marins : l’acoustique sous-marine.
La révolution de l’acoustique sous-marine
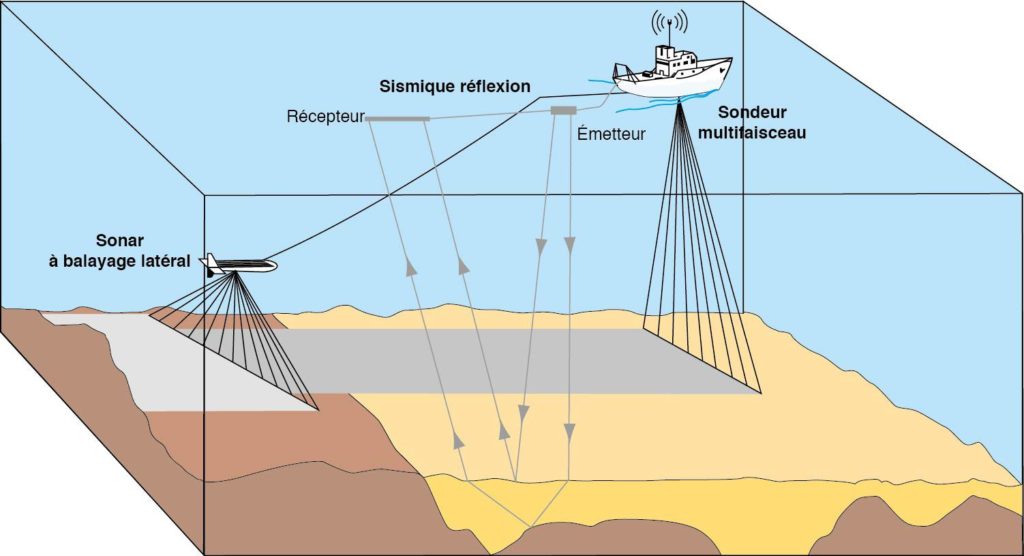
L’histoire moderne de l’acoustique sous-marine débute au début du XXe durant la Première Guerre mondiale avec la mise au point par Paul Langevin d’un transducteur piézo-électrique pour la détection acoustique active de sous-marins. Ce système de mesure a été développé sous la direction franco-britannique du Allied Submarine Detection Investigation Committee ou ASDIC, terme qui sera par la suite repris pour désigner les systèmes de détection acoustique actifs. S’en suit durant l’entre-deux-guerres une période de développement intense de systèmes acoustiques actifs et passifs ainsi que la théorisation de la propagation des ondes acoustiques en milieu aquatique. Ces recherches sont principalement menées par des laboratoires américains dont les systèmes acoustiques sont nommés sonar (sounding navigation and ranging) à partir de 1942 par analogie au terme radar (radio detection and ranging). L’ensemble des efforts de recherche en acoustique sous-marine durant les deux guerres a abouti à la mise au point des premiers sondeurs monofaisceau (precision depth recorders ou PDR), et au développement de sonars latéraux à la fin des années 1950.

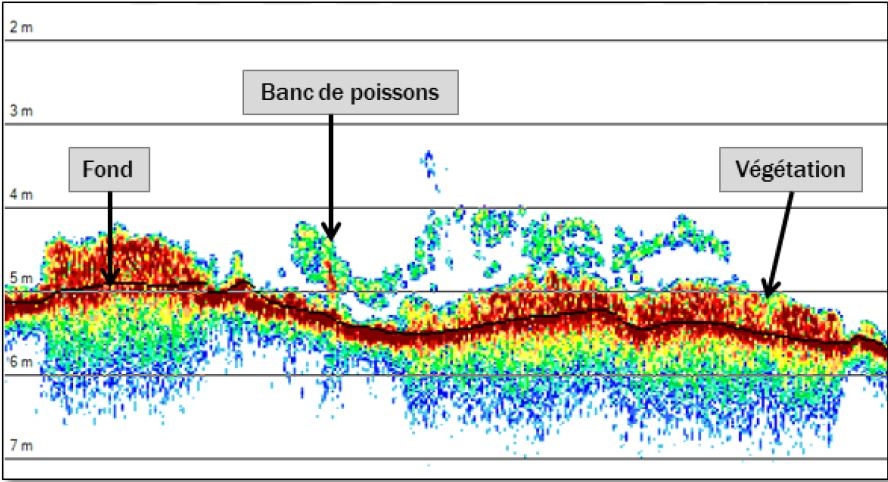
Le sondeur monofaisceau fonctionne sur le principe de l’émission d’un signal acoustique d’une fréquence donnée vers le fond sur un unique faisceau (d’où son nom) qui est ensuite réfléchi par le fond. Le temps de retour de ce signal permet de mesurer la profondeur. Les propriétés du signal réfléchi par le fond permettent d’en déterminer la nature et plus particulièrement les faciès sédimentaires. Cette technique de classification des fonds, mise au point dans les années 1990, a évolué quelques années plus tard jusqu’à permettre de cartographier la végétation marine. Selon la fréquence du sondeur, il est possible de pénétrer plus ou moins profondément dans le sédiment et ainsi d’obtenir une imagerie acoustique du sous-sol marin sous la forme de sonogrammes1. La principale limite de cette technologie, que ce soit pour les mesures bathymétriques ou la classification des fonds, est sa très faible couverture surfacique s’apparentant plus à des lignes de mesure qu’à des aires cartographiées intégralement.
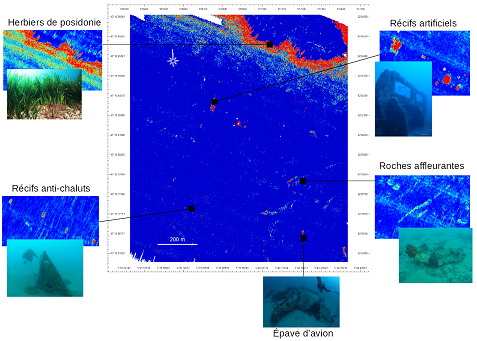
Le sonar à balayage latéral permet d’obtenir une image du fond en nuances de gris. Il fonctionne sur le même principe émetteur/récepteur que le sondeur monofaisceau, à la différence que l’émission/réception se fait latéralement depuis un « poisson » tracté par un navire. Selon la nature du fond (roche, sédiment), l’intensité du signal réfléchi en fonction de l’angle d’incidence variera et permettra de générer l’image acoustique. Cette technologie a initialement été développée pour détecter des épaves et des mines sur les fonds marins. Depuis les années 1990, les images du sonar à balayage latéral sont également employées pour cartographier les habitats marins à grande échelle.

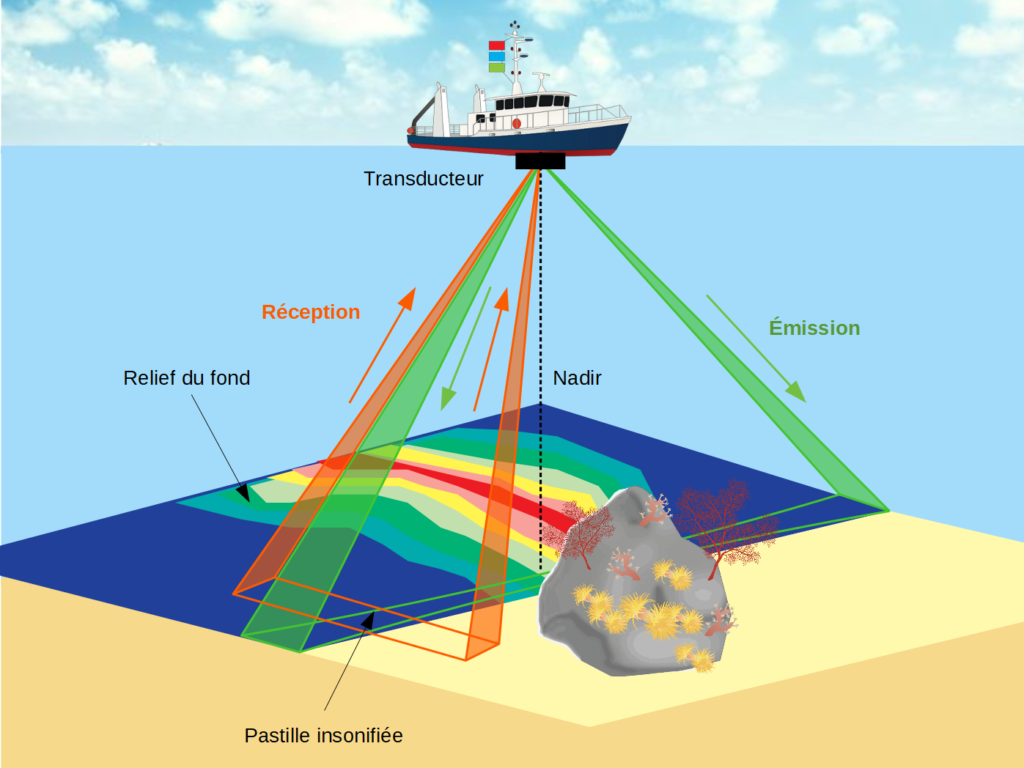
Une nouvelle technologie acoustique est développée durant la deuxième moitié du XXe siècle et fait en quelque sorte la synthèse du sondeur monofaisceau et du sonar à balayage latéral : le sondeur multifaisceaux (SMF). Comme son nom l’indique, il fonctionne grossièrement comme un sondeur monofaisceau mais permet d’avoir une large couverture surfacique grâce à son nombre multiple de faisceaux (plusieurs centaines sur les modèles les plus récents). Les premiers SMF font leur apparition à la fin des années 1970s. La première campagne a lieu en 1975 avec un sondeur « Bo’sun » de 21 faisceaux pour une portée maximum de 800 m. En 1977, la portée du SMF Sea-Beam est testé jusqu’à 6000 m de profondeur par le CNEXO (futur IFREMER) au large des côtes armoricaines.
Le fonctionnement du SMF repose sur le principe des faisceaux croisés. Généralement, l’émission de l’onde acoustique se fait dans un faisceau large transversalement et étroit longitudinalement. La réception, quant à elle, est réalisée grâce à un algorithme de formation de voies, dans un lobe étroit transversalement et large longitudinalement. L’intersection entre le faisceau d’émission et le faisceau de réception correspond à la zone du fond insonifiée (cartographiée). La mesure est ainsi réalisée sur une multitude de points répartis le long d’une ligne perpendiculaire à la trajectoire du navire.
Limité dans ses premières utilisations à la réalisation de mesures bathymétriques, le SMF a régulièrement évolué au cours des années qui ont suivi sa création, avec notamment la capacité d’obtenir des images de la réflectivité du fond à la fin des années 1980 et des images acoustiques de la colonne d’eau au début des années 2000. L’ensemble de ces données permet de nos jours d’obtenir une cartographie complète des fonds grâce à l’utilisation d’algorithmes permettant de détecter les différents habitats des fonds marins, ainsi que d’étudier l’activité biologique de la colonne d’eau tout en disposant de mesures bathymétriques d’une précision centimétrique.
A ce jour, l’acoustique sous-marine est le seul moyen de cartographier le fond des océans quelque soit la profondeur. Les abysses n’échappent pas à ces puissants outils de détection et la carte bathymétrique mondiale est désormais très complète. Cependant, de nouvelles techniques aéroportées de cartographie ont été développées au cours des dernières décennies avec pour but d’étudier les fonds littoraux.
Prendre de la hauteur pour cartographier le fond
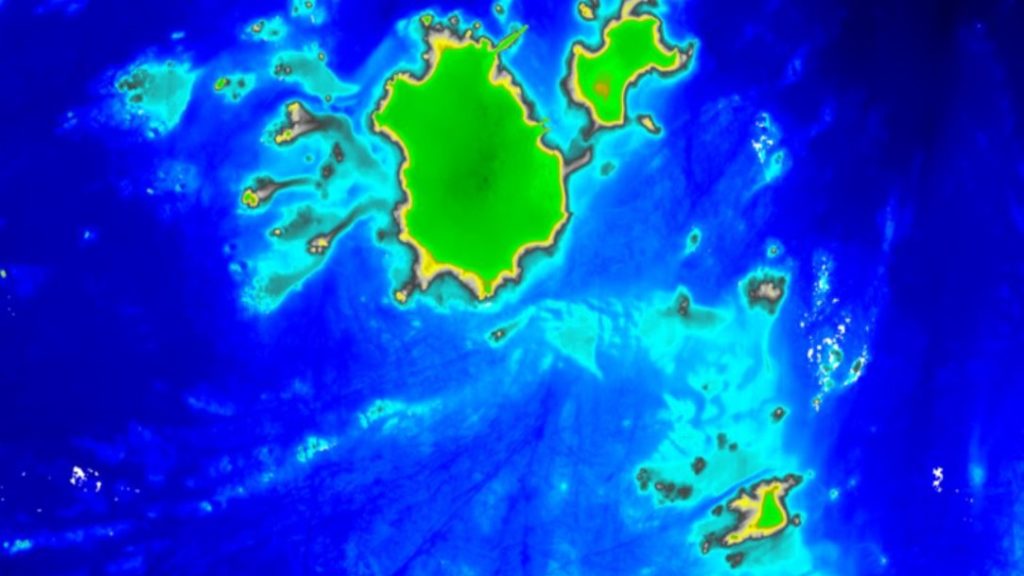
Depuis la fin du XIXe siècle, nous avons les moyens de prendre des clichés aériens grâce à l’utilisation de montgolfières et plus tard d’avions. Ces premières photographies aériennes sont une manne pour étudier la topographie, l’urbanisme et le paysage. Plus globalement, c’est un nouveau moyen de cartographier à grande échelle les territoires. Cette pratique a gagné en efficacité avec l’avènement de l’informatique puis de la photographie numérique pour traiter les clichés aériens. Les images aériennes ainsi produites sont nommées « orthophotographies » car elles sont rectifiées géométriquement en prenant en compte la topographie du terrain photographié. Dans les années 1980, le large réseau satellite a permis d’augmenter l’échelle d’étude tandis que la résolution de leur imagerie ne cesse d’augmenter. Récemment, un nouveau bond dans la technique s’est produit avec l’utilisation généralisée des drones aériens il y a une dizaine d’années. S’il est assez intuitif de comprendre l’utilité de telles photographies pour le milieu terrestre, qu’en est-il pour le milieu marin ?
L’utilisation de photographies aériennes pour cartographier le milieu marin est fortement liée à la turbidité de l’eau et à la profondeur. Elle se limite donc aux zones littorales et aux habitats marins que l’on peut y observer : roche, sable, herbiers, récifs coralliens. Dans les eaux les plus claires, il est possible de détecter des habitats marins jusqu’à environ 15 mètres de profondeur. Il est également possible d’utiliser des images infrarouge pour discriminer la végétation marine (plantes, algues) de la roche et du sédiment. Des logiciels informatiques permettent le traitement de ces images de façon semi-automatisée en utilisant des algorithmes d’analyse d’images et depuis quelques années l’intelligence artificielle. Le principal avantage de cette technique de cartographie est la large échelle spatiale d’étude tout en conservant une résolution élevée (de l’ordre de quelques mètres à quelques décimètres). La limite majeure est le pas de temps entre les acquisitions à grande échelles de telles images qui nécessite l’utilisation d’un avion. Le drone aérien permet de palier en partie à ce problème en permettant des réaliser des orthophotographies à échelle plus réduite pour un coût bien inférieur. En France, des campagnes par avion ont lieu environ tous les trois ans et ces images sont librement visualisables sur la plateforme web de l’IGN (https://www.geoportail.gouv.fr).

Afin d’aller plus loin dans la découverte des fonds marins depuis les airs, un autre moyen optique est disponible : le lidar bathymétrique. La technologie du lidar (light detection and ranging) repose sur l’utilisation d’un émetteur/récepteur laser pour relever la topographie d’un terrain en mesurant le temps que met un rayon émis et réfléchit par le sol à revenir sur le capteur. Le lidar dit « bathymétrique » utilise quant à lui des longueurs d’onde lumineuse vertes (par opposition au laser rouge en milieu terrestre) pour pouvoir pénétrer la surface de l’eau et atteindre le fond marin.
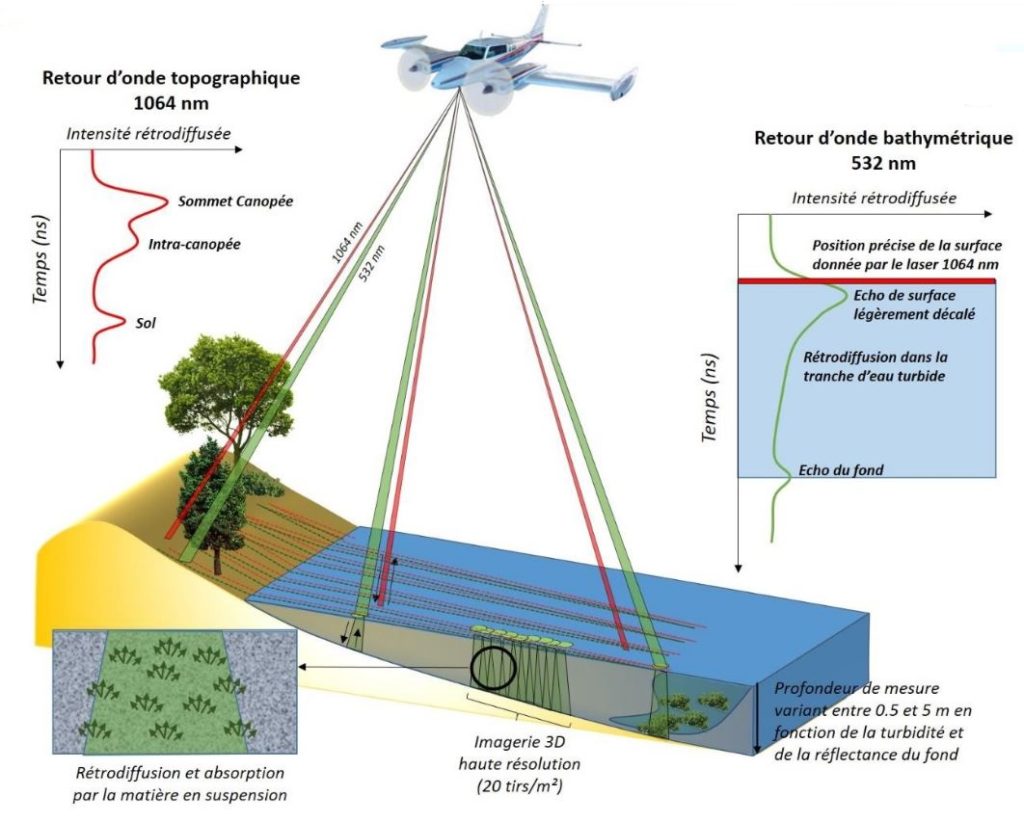
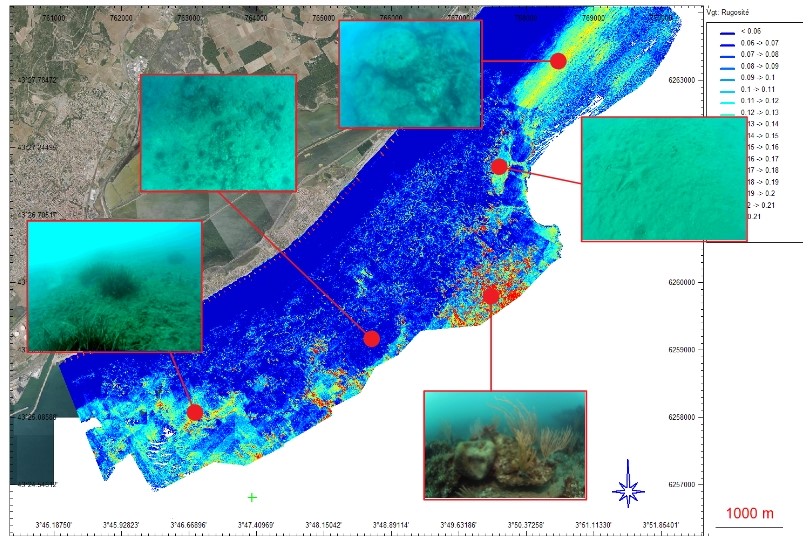
Finalement, cette technique fonctionne sur le même principe que les ondes acoustiques à la différence que le lidar bathymétrique est limité par la turbidité de l’eau, tandis que l’acoustique sous-marine ne l’est pas. Les données obtenues sont donc de même nature que celles obtenues avec l’acoustique : des données bathymétriques et de l’imagerie en nuance de gris de la réflectivité du fond. Les mêmes traitements permettant de cartographier les habitats marins peuvent ainsi être transposés. Ces deux techniques sont parfaitement complémentaires, le lidar permettant d’obtenir des données dans des zones peu profondes où les méthodes acoustiques sont très coûteuses. La réalisation de campagnes de levé par lidar requièrent cependant des moyens matériels très coûteux. Dans le futur, la miniaturisation du matériel permettra certainement de réaliser ces campagnes avec des drones et non systématiquement avec des avions. En France, une grande partie du littoral de Métropole et d’Outre-Mer a été cartographiée au lidar pour fournir un modèle continu terre/mer dans le cadre du programme Litto3D du SHOM (Service Hydrographique et Océanographique de la Marine). Ces données sont librement accessibles ici : https://data.shom.fr/.
Les fonds marins en très haute définition grâce à la photogrammétrie
A ce stade de l’article vous devez certainement penser que ces moyens de télédétection ont l’air très performants, mais pourquoi ne pas utiliser directement des photographies des fonds marins, que l’ont assemblerait pour avoir une immense mosaïque éliminant tout doute sur ce qui se trouve sur le fond des océans ? Et bien, depuis une petite dizaine d’années, cela est possible sous l’eau grâce à l’avènement de la photogrammétrie sous-marine.
Mais tout d’abord, la photogrammétrie qu’est-ce que c’est ? Pour faire simple, c’est une technique de mesure utilisant la parallaxe entre différente photographies pour reconstituer le relief de la scène photographiée (par exemple un paysage, un monument, une sculpture). En fait, la photogrammétrie fonctionne sur le même principe que notre vision stéréoscopique. Par exemple nous sommes capables de reproduire le relief d’un paysage grâce aux deux images produites par chacun de nos yeux. Pour reproduire avec des photos ce que notre cerveau réalise de façon automatique avec notre vue, des calculs géométriques (dont certains sont très complexes) sont nécessaires. Pour faire simple, les calculs photogrammétriques se basent sur l’identification de points homologues entre deux images et une suite de calculs vectoriels permettant de replacer les points homologues dans l’espace. A l’issue de ce processus, un nuage des points remarquables en 3D est obtenu et permet de générer notamment deux types de produits fort utiles dans l’étude des biotopes marins : une mosaïque photographique et un modèle 3D photo-texturé.
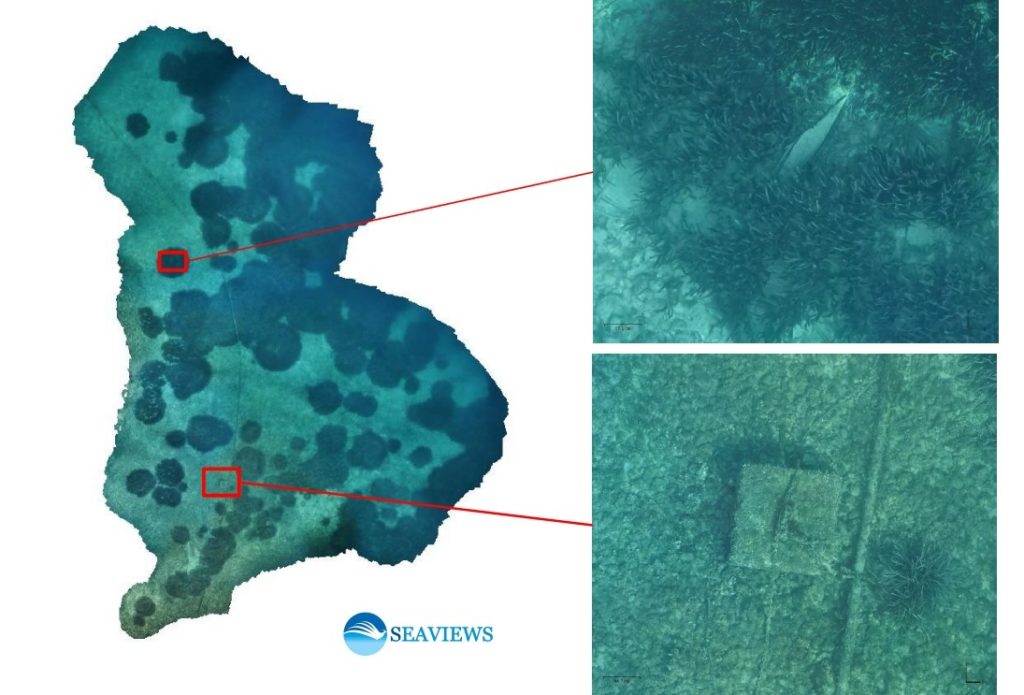
Les applications de la photogrammétrie en milieu marin sont nombreuses : archéologie, inspection, topographie, biologie, tourisme pour ne citer que les plus courantes. Depuis quelques années, les habitats marins de Méditerranée sont de plus en plus fréquemment cartographiés et étudiés avec cette technique. Parmi eux, les prairies formées par la plante marine Posidonia oceanica (la posidonie) le long de nos côtes méditerranéennes révèlent des informations inédites sur leur structure spatiale dans les trois dimensions et la richesse de l’alternance de biotopes des fonds marins.
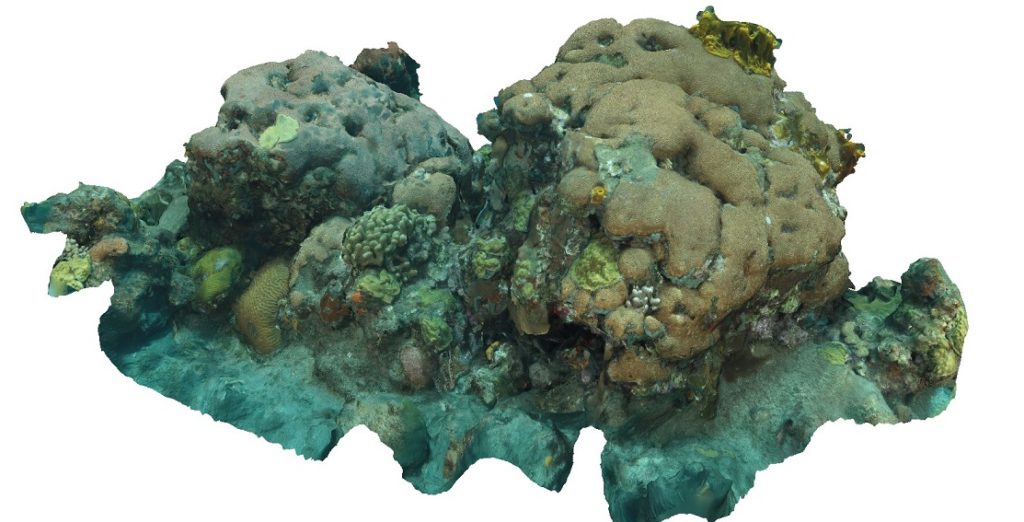
Pour se rendre compte de la puissance d’observation fournie par la photogrammétrie, il faut savoir que les méthodes classiques de cartographie des herbiers (principalement avec des sondeurs acoustiques) ont une résolution, au mieux, de l’ordre du décimètre ou du mètre. Les mosaïques photographiques issues de la photogrammétrie ont quant à elle une résolution centimétrique voire millimétrique. Grâce à cette haute définition, il est possible non seulement d’identifier la totalité des habitats et des substrats (herbier feuillu, herbier non feuillu, dépôts de feuilles mortes, sédiments,), mais aussi d’identifier certaines espèces fixées ou peu mobiles inféodées à la prairie de posidonies (oursins, holothuries, grandes nacres, autres plantes et algues marines).
Le mot de la fin
Ce court article ne fait qu’introduire la thématique de la cartographie sous-marine. Les techniques et les équipements évoluent sans cesse à une vitesse qui s’accélère depuis une quinzaine d’années. Une formidable palette d’outils est à la disposition des scientifiques et des gestionnaires du milieu marin selon leur capacité financière, la taille de la zone et le sujet à étudier ainsi que la résolution des données désirée. Il faut cependant garder à l’esprit la mesure de notre ignorance de la nature des fonds marins, car la grande majorité des cartographies réalisées concerne les eaux littorales. Les grands fonds gardent tous leurs mystères, la surface de la Lune et de Mars étant mieux connue que celle de nos océans.
Glossaire
1Sonogramme : représentation utilisée pour l’analyse spectrale des sons selon une graduation de couleur, en fonction de la fréquence et du temps, respectivement portés en ordonnée et en abscisse.
Pour en savoir (beaucoup) plus
http://expositions.bnf.fr/lamer/arret/index13.htm
https://www.amhydro.org/assets/files/Chapitre-3.pdf
Abadie A, Viala C (2018) Le sondeur multifaisceaux en hydrographie : utilisations actuelles et futures. XYZ 157: 17-27
Abadie A, Boissery P, Viala C (2018) Georeferenced underwater photogrammetry to map marine habitats and submerged artificial structures. The Photogrammetric Record 33 (164): 448-469
https://cartosub.seaviews.fr/la_ciotat/
L’auteur

Arnaud Abadie est un écologue marin et un photographe subaquatique. Biologiste marin en Méditerranée pendant dix ans, il est désormais chargé d’études milieu marin à l’Agence de l’Eau Artois-Picardie. Arnaud est le fondateur de Sea(e)scape et l’un de ses contributeurs régulier.
Bonjour, je me pose la question sur la pollution des pratiques pour la cartographie des océans, est-ce que les méthodes classiques de la cartographie des océans serrait t’elle plus polluante que la photogrammétrie ? Est-ce que la photogrammétrie des océans prend t’elle plus de temps à se faire par rapport aux méthodes classiques ?
Bonjour et merci pour votre lecture de l’article !
Je ne suis pas certain de bien comprendre votre question. Voici quelques éléments de réponse.
La pollution des méthodes de cartographie provient principalement du moyen de propulsion du navire utilisé. L’immense majorité des embarcations utilise de l’essence et sont donc polluantes. Que vous utilisiez des méthodes acoustiques ou photographiques vous ne pouvez pas vous affranchir de cette pollution. De plus la photogrammétrie est à l’heure actuelle uniquement pertinente pour des zones de petite taille. Il est donc difficile de comparer avec d’autres méthodes qui sont couramment utilisées pour des zones de grande taille (comme les méthodes acoustiques).
Si vous pensez à la pollution acoustique des sondeurs, leur fréquence très haute n’interfère normalement pas avec celles beaucoup plus basses des mammifères marins. Par contre nous ne savons pas si elles ont un impact sur d’autres types d’organismes marins.